2-nd-DL-CVMarathon Learning Notes1
Two Stage
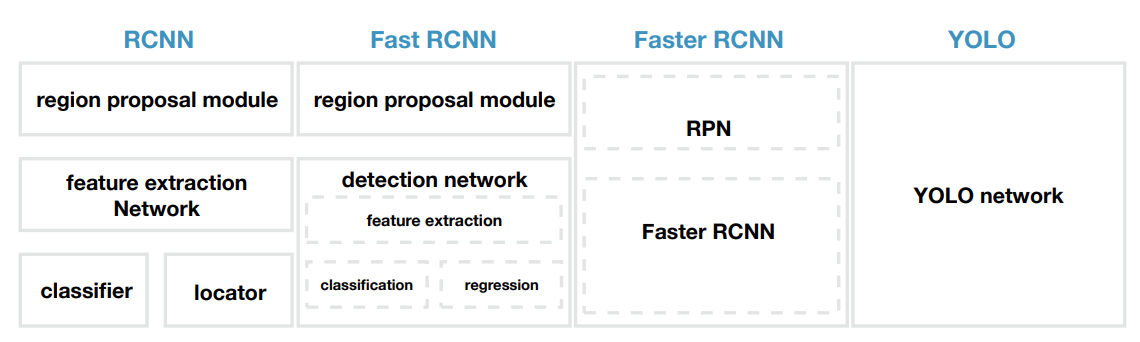
R-CNN : Regions with CNN features
-
特色
- 運用Selective Search 提出Region Proposal
- Resize到相同到大小
- 透過SVM做分類,分類完再使用Regrssor修正BBOX
-
問題
- 那 R-CNN 有什麼樣的問題呢?
-
簡而言之就是『速度慢』,其原因主要有以下兩點
-
經由 Selective Search 提出的 Region Proposal 都要獨自經過CNN 做特徵提取,運算速度相當緩慢。
-
經過 CNN 得到 feature map,再用這些 feature 當成 SVM 的input 當成訓練資料, 因此並不是一個 end-to-end 模型 ( SVM 的LOSS 並不會改動到 feature map 的數值)
-
Fast R-CNN
-
特色
- 運用Selective Search 提出Region Proposal
- 整張圖片送進去 CNN 提取特徵
-
ROI Pooling 是⼀種能將不同 Region proposals (候選框),Pooing 成⼀樣⼤⼩的⼀個⽅法。
- ROI 就是 Region Proposals
-
Loss Function
- Softmax 取代原本SVM
- 同時做BBOX regression
-
問題
Fast R-CNN 解決了什麼問題?
- 原本每一個 Region Proposal 都要經過 CNN 提取特徵現在只需要將整張圖送入,速度上有很大的優勢。
- 運用Softmax 取代 SVM,並同時加入了 BBOX regression 到模型中與分類一起收斂。
Fast R-CNN 有什麼問題?
- 還是需要透過 Selective Search 提出 Region Proposal,沒辦法統整成 End-to-End model 訓練。
Faster R-CNN
-
特色
- 原圖直接通過 CNN 提取特徵
- 透過 RPN(Region Proposal Network) 結構提出 Region Proposal
- 一樣要運用 ROI Pooling 將候選框變成一樣大小,後面結構則是跟 FastRCNN相同
-
問題
Faster R-CNN 解決了什麼問題?
- 不用 Selective Search,而改用 (Region Proposal Network) 來提取proposals ,達到真正的 End-to-End
Faster R-CNN 有什麼問題?
- 還是需要先提出 Region Proposal,整體而言速度受到一定的限制。
One Stage
One Stage 核心觀念-不要先浪費時間提出 Region Proposal,而是以 Default Anchor Box 取代
YOLO系列V1-V3
YoloV1解決了什麼問題
- 不用花費時間提出 Region Proposal。
YoloV1 有什麼問題?
- 只透過最後一層預測,而由於最後一層的 Feature Map尺吋只有7*7,已經喪失許多空間訊息,因此對小物件不敏感。
- FC層造成空間訊息損失。
SSD(Single Shot Multibox Dectector)
SSD 解決了什麼問題
- 多尺度預測,對於物件更敏感。
SSD 有什麼問題?
- 正負樣本不平均,太多背景,使用 Online hard example mining(OHEM)使易分類樣品消失 。
- 運用淺層 Feature Map 偵測小物件,但特徵訊息不夠豐富對小物件敏感度仍比不上 Faster R-CNN。
RetinaNet
RetinaNet 的主架構與 SSD 很像,重點在於加入了 Feature Pyramid Network (FPN) 的結構,把淺層的 Feature Map 與深層的 Feature Map 疊加後做預測,確保淺層語義訊息也能夠豐富。
RetinaNet 解決了什麼問題?
- 多尺度預測,對小物件更敏感。
RetinaNet 有什麼問題?
- Focal Loss 中 Hyperparameters 的調整對結果影響大。